Роботы с тактильными датчиками: новая эра перевозки грузов

Переезд в новый дом — настоящее испытание, сродни сборке гигантской трехмерной головоломки. Каждый предмет должен найти свое место, ничего не должно болтаться или быть неустойчивым, иначе есть риск повреждения в пути.
Для человека балансировка предметов, будь то поднос с едой или стопка коробок, — естественный процесс, обеспечиваемый координацией мышечной и вестибулярной систем. Но для роботов поддержание равновесия при переноске грузов — задача куда более сложная. Им необходимо непрерывно отслеживать положение объекта и собственное положение тела, чтобы вносить корректировки в реальном времени и не упасть.
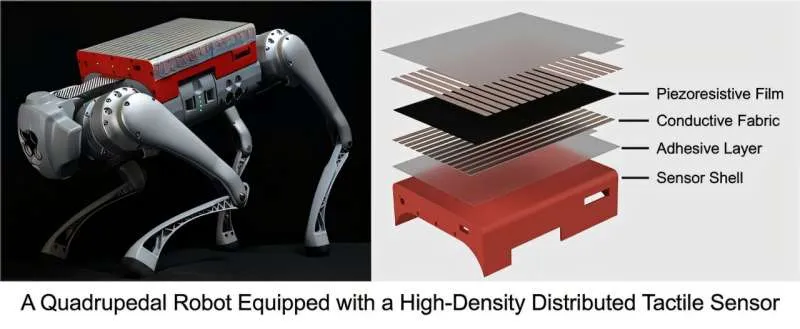
Чтобы преодолеть это препятствие в робототехнике, исследователи из Департамента машиностроения Университета Карнеги — Меллона разработали тактильный датчик, позволяющий четвероногому роботу переносить незакрепленные цилиндрические объекты на спине на большие расстояния.
Ранее четвероногие роботы были ограничены использованием коробок для транспортировки, что сужало спектр перемещаемых объектов. С LocoTouch, высокоплотной распределенной матрицей тактильных датчиков, покрывающей всю спину робота, машина получает обратную связь о положении объекта на ее спине и корректирует собственное движение, чтобы удержать его.
«Тактильный датчик состоит из пьезорезистивной пленки, зажатой между проводящими электродами из проводящей ткани», — поясняет Чанъи Линь, кандидат наук из лаборатории Safe AI Lab. «Каждый чувствительный элемент расположен на пересечении проводящих электродов. Когда объект смещается и деформирует пьезорезистивную пленку, изменение сопротивления фиксируется пересекающимися электродами».
Благодаря более чем 4000 цифровым двойникам робота-собаки и методу обучения с подкреплением команда смогла обучить робота корректировать свои движения практически при любом смещении объекта на спине. Навыки, полученные в симуляции, были успешно перенесены в реальный мир без необходимости доработки. В лаборатории робот смог объезжать конусы, преодолевать препятствия и реагировать на внешние воздействия (например, когда человек толкал объект), при этом транспортируя объекты различной формы и размера на расстояние более 60 метров.
«Роботы должны работать на благо людей, поэтому им необходимо уметь взаимодействовать с нашей средой и воспринимать наш мир так же, как мы. Это первый случай применения тактильного зондирования в четвероногих роботах, но мы не остановимся на этом», — говорит Дин Чжао, доцент кафедры машиностроения. «С таким циклом обратной связи роботы смогут выполнять более сложные задачи. Мы работаем над масштабированием датчиков, чтобы они могли покрывать всего робота в будущем».
Команда утверждает, что эта технология приближает нас к созданию роботов-помощников по дому. Кроме того, ее планируется использовать вне помещений для доставки датчиков в труднодоступные места для мониторинга оползней. Технология также может найти применение в больницах, на производственных площадках и, возможно, однажды будет установлена в кузове грузовика, чтобы облегчить перевозку грузов.
Галерея









Комментарии
Комментариев пока нет.