Искусственные мышцы: превосходя биологические аналоги

Наука не перестает удивлять: инженеры и ученые добились значительных успехов в создании искусственных мышц, которые не только имитируют, но и превосходят возможности своих биологических прототипов. Недавний обзор, опубликованный в авторитетном научном издании, посвящен детальному изучению последних достижений в области волокнистых искусственных мышц – наиболее приближенного к живым аналогам типа создаваемых мышечных заменителей.
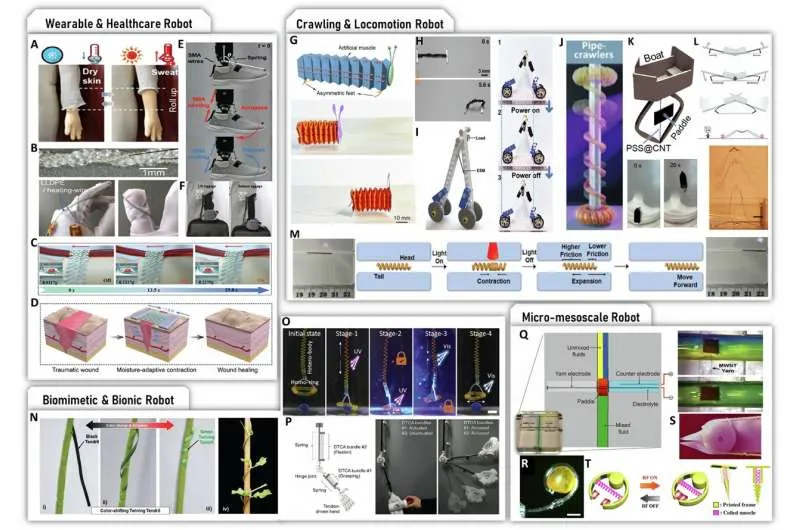
Существующие искусственные мышцы используют разнообразные методы активации, такие как пневматика, электроактивные полимеры и сплавы с памятью формы. Однако многие из них сложны в управлении, обладают ограниченными возможностями или слишком громоздки для широкого применения. В отличие от них, волокнистые искусственные мышцы отличаются высокой гибкостью, адаптивностью и многомерностью движения. Их конструкция, вдохновленная природными мышцами, позволяет реализовывать различные типы движений: изгиб, кручение, растяжение и изометрические сокращения.
«Вдохновленные природными механизмами и биологическими структурами, волокнистые искусственные мышцы генерируют движение за счет изменения внутренней реакции волокон на внешние раздражители. Подобно крошечным миофибриллам, отвечающим за сокращение в биологических мышцах, они способны создавать мощные движения в увеличенном масштабе. Основываясь на этих принципах, волокнистые искусственные мышцы могут иерархически воспроизводить разнообразные движения, аналогичные биологическим мышцам», — объясняют авторы исследования.
Активация волокнистых искусственных мышц происходит благодаря изменениям в их внутреннем материале под воздействием внешних факторов, таких как свет, электрические сигналы, тепло, химические вещества или растворители. Эти системы работают на основе механизмов молекулярной переориентации, объемного расширения и изменения межволоконного расстояния. Состав материала и архитектура волокон также играют ключевую роль в функционировании механизмов активации.
Авторы исследования отмечают, что в то время как биологические мышцы в основном используют растяжение, волокнистые искусственные мышцы часто задействуют кручение для достижения различных видов движения. Обзор выделяет четыре основных метода активации, доступных для волокнистых искусственных мышц: кручение, растяжение, изгиб и изометрия. Кручение осуществляется за счет предварительно скрученных волокон, которые при раскручивании создают вращательное движение.
«Мышцы, активируемые паром, особенно те, что работают на влаге или этаноле, демонстрируют значительные угловые смещения. Наивысшие зафиксированные скорости вращения достигают 11 500 об/мин и 10 500 об/мин, соответственно, достигнутые композитным материалом на основе углеродных нанотрубок и полимера, активируемым теплом, и волокном из сплава NiTi с электротермическим приводом», — сообщают исследователи.
Тем временем, активация растяжением, включающая линейное удлинение или сокращение вдоль волокна, продемонстрировала 8600% деформации при растяжении в мышцах на основе витых прядильных нитей.
Изометрические модели также показали впечатляющие результаты. Исследователи пишут: «Электрохимическая изометрическая активация была зафиксирована в различных исследованиях. Например, искусственная мышца, имитирующая мышцу мидии, показала высокую производительность с максимальным напряжением изометрического сокращения 17,7 МПа. Мышца на основе нейлона продемонстрировала 28,4 МПа, что более чем в 100 раз превышает напряжение изометрической активации скелетных мышц млекопитающих (примерно 0,35 МПа)».
Наконец, активация изгибом обеспечивает движения, имитирующие сгибание суставов, с высокой степенью свободы. Авторы исследования считают, что активация изгибом открывает широкие перспективы для биомиметических и роботизированных применений. В качестве примера приводится программируемая мышца, управляемая лазером, способная к многомерному и разнонаправленному изгибу путем регулировки направления и положения лазерного облучения.
Потенциальные сферы применения оптимизированных волокнистых искусственных мышц практически безграничны. В области биомедицины это могут быть устройства для закрытия ран, гемостатические повязки, реабилитационные костюмы и микрохирургические инструменты. Мягкие роботы для локомоции, ползания, плавания и выполнения биомиметических задач могут найти применение во многих отраслях. Умный текстиль, способный адаптироваться к температуре и другим изменениям окружающей среды, позволит людям безопаснее осваивать непригодные для жизни условия.
Тем не менее, предстоит еще немало работы. Современные волокнистые искусственные мышцы все еще ограничены сложностью производства и стоимостью материалов, а также долговечностью и интеграцией с другими системами. Исследователи работают над внедрением функций самовосстановления, сенсорики и сбора энергии в некоторые конструкции, в то время как другие ищут пути реализации масштабируемого, устойчивого производства с использованием таких материалов, как хлопок или волокна лотоса.
«Заглядывая в будущее, мы видим, что развитие волокнистых искусственных мышц будет определяться использованием новых материалов и методов активации для преодоления разрыва между биологическими и синтетическими системами движения. Благодаря постоянному технологическому прогрессу, ожидается, что искусственные мышцы нового поколения достигнут беспрецедентного уровня эффективности, отзывчивости и универсальности, открывая путь к усовершенствованным роботизированным возможностям и улучшению человеческих способностей», — заключают авторы исследования.
*Признаны экстремистскими организациями и запрещены на территории РФ.
Галерея
![[ASIA] HONKAI Аккаунт 70 Ур. Освоения – Полный Дос...](https://e-digi.ru/images/products/product_5151533.webp)







![Аккаунт Honkai: Star Rail [Азия] с Серебряным Волк...](https://e-digi.ru/images/products/product_5157079.webp)

Комментарии
Комментариев пока нет.